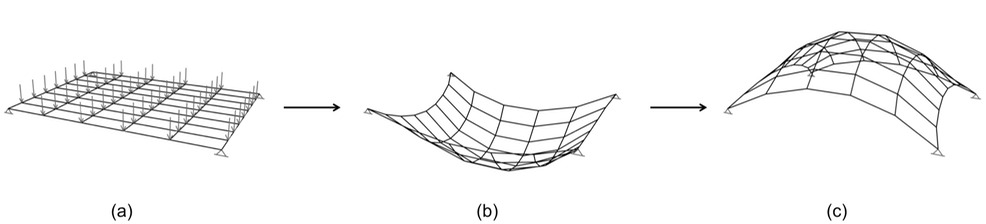
Once the plan area at clearance height has been established through the shading analysis, a structural form, which will encompass this large span area, is generated. To span large urban spaces (such as recreational playgrounds) without intrusive intermediate supports, a number of structural typologies are available. To achieve an efficient large span three dimensional system, a shell structure is favorable as this rigid curved surface resists external loads efficiently through membrane stresses. The global form of the shell is generated using a form finding technique based on a hanging particle spring model. Form finding is a forward process in which parameters are directly controlled to find the optimal form of a structure which is in static equilibrium with a design loading. For louvered shells, the design loading is the dead load or self-weight, a gravity load. Parameters can be imposed to control the shape generated by the form finding process, including boundary conditions (such as encompassing the plan area at clearance height), supports, external loads, member properties (such as elastic stiffness) and the topology of the model. The louvered shell is essentially a shell with its structure concentrated into individual members in a relatively fine grid compared to the overall dimensions of the shell. Initially the geometry of the louvered shell is an unknown and the form finding process requires an arbitrary starting grid geometry. In the hanging particle spring model, an initially two-dimensional (2D) grid is simulated as a network of springs, supported at specified supports. The form finding technique allows the grid to relax or “fall” under gravity loads applied at the spring connections (figure (a) below). The resulting hanging shape is a grid of spring elements in tension (b). Upon locking and inverting this hanging shape, a grid shell geometry is achieved with its elements in compression, a characteristic which is desirable to achieve structural efficiency (c). Through an iterative process, the design parameters (especially the spring’ elastic stiffness) are fine-tuned to ensure that the plan area at the clearance height (obtained from the shading analysis is embodied by the generated shape.